Mobile-R Robot Control System Framework
In order to provide as much compatibility and configurability, a Mobile-R robot contol system can be created from a variety of component configurations. This provides a wide range of implementable robot architectures from purely reactive to purely deliberative systems.
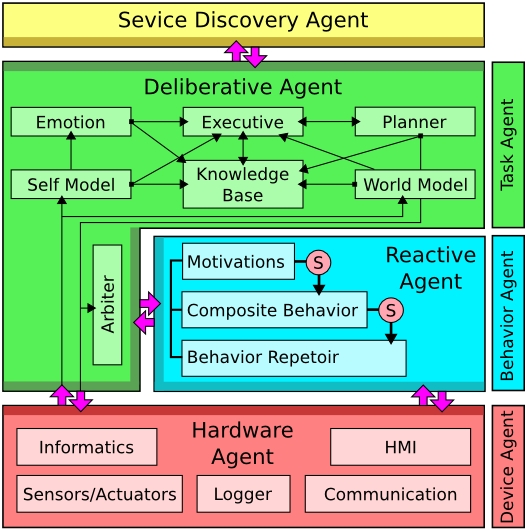
Figure 1: Robot Control System framework of Mobile-R.
Robot Control Agency Components
The robot control agency used in Mobile-R should comply with
an agent standard that is actively updated and widely used.
Therefore, Mobile-R utilizes Mobile-C, an IEEE FIPA stand compliant
mobile agent system, as its robot control mobile agency.
Using Mobile-C guarantees interoperability with other FIPA compliant agent
systems that are used as either higher level agencies or enterprise systems.
The robot control system framework utilizes a multi-agent system design
as shown in Figure 1.
The robot control system framework is comprised of seven different types of
mobile agents: a deliberative, a reactive, a hardware, a service discovery
agent, and possibly multiple task, behavior and device agents.
Using mobile agents provides flexibility in rapid on-line system
reconfigurability.
The following sections describe the capabilities and operating directives of
each of these agents and their communication protocols.
Deliberative Agent
The Deliberative Agent acts as the deliberator or executive layer of the
robotic system and encompasses multiple sub-modules including but not
limited to the arbiter, self model, world model, knowledge base,
planner, emotion and executive.
However, the number of implemented deliberative modules is application
dependent.
The arbiter module arbitrates the behavioral components
of the Reactive Agent and is directly controlled by the planner module.
This allows the Deliberative Agent to control unforeseen emergent
behaviors, inhibit or excite specific behavioral components if necessary.
The arbiter module communicates with the Reactive Agent using ACL message
with a specific arbitration protocol.
The self model module keeps track of all of the current and
previous internal states of the robot.
Storage of the previous internal states is accomplished with the
internal knowledge base.
The world model module keeps track of all of the current and
previous external environmental states including mapping, coordinate
location, location of other robots and objects, goal position,
and terrain data.
Storage of world model information is accomplished with the internal
knowledge base.
The knowledge base module keeps track of previous internal
robot and external environmental states, arbitration and planner
commands, emotional states, and any other information necessary
for the proper execution of the executive module.
The planner module works in conjunction with the executive
module and uses information from the world model to determine the
next appropriate actions.
Internally, the planner decomposes higher level planning information from
the executive module into the appropriate sequence of actions including
either direct control of the robot by interacting with the Hardware Agent
or controlling the Reactive Agent through the arbitration module.
The emotion module utilizes information from the self model
module to determine the current emotional state of the robot.
The executive module setups an internal
belief-desire-intention (BDI) system and gathers current and previous
information concerning all of the other modules.
The executive module works with the planner in order to determine an
appropriate sequence of actions to take next.
The emotion module and BDI system keep the executive and planner modules
from spending too much time on planning future actions.
Depending on the current state of the system and the environment, the
executive module may be rushed to make a decision due to a sense of
impatience.
Reactive Agent
The Reactive Agent acts as the low-level reactive controller of the robotic system and encompasses multiple sub-modules including motivations, composite behaviors and a behavior repertoire. The reactive system follows traditional subsumption architectures where higher hierarchical behavioral levels may inhibit or suppress the output of lower levels as shown in Figure 2.
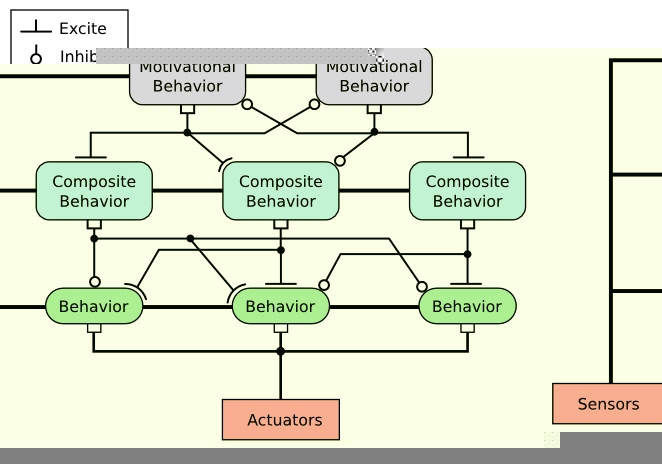
Figure 2: The behavioral components in one possible connection setup.
The Reactive Agent will continuously update the actuator driver control signals at a constant frequency. During each cycle, the Reactive Agent gathers new sensor data, executes each of the behavioral components, sums up their outputs, and updates the actuator driver control signals as shown in Figure 3.
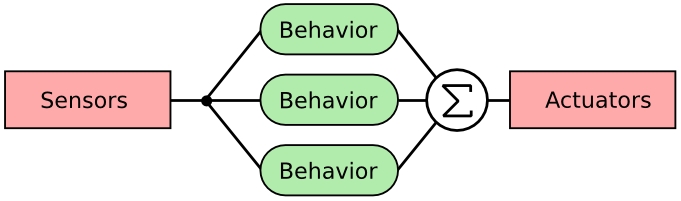
Figure 3: The behavioral component summation and output.
Each behavior component receives the same sensor data and generates the
required number of actuator outputs.
Higher level control through Reactive Agent and Deliberative Agent
collaboration allows for deliberate arbitration of the behavioral
components to control non-desirable emergent behaviors.
When dealing with unstructured environments, it is impossible to foresee,
implement, and store all possible behavioral components on a robot.
New behavioral components can be obtained by having the robot instantiate a
new behavior agent which then migrates to the knowledge base or other
robots to obtain new behavioral components based on the desired criteria
set forth by the robot.
Desired criteria come from the task agent list of minimum required behavior
functionality for the success of a task.
Different behaviors can be tested and autonomously ranked in terms of
usability for a given task which is can then be stored internally, shared
with other robots and/or the knowledge base for future reference.
Hardware Agent
The Hardware Agent is the hardware abstraction layer of the robotic
system and includes, but is not limited to, the sensor and
actuator hardware abstraction, communication hardware and
protocols, informatic algorithms, logger, and
a human-machine interface (HMI) modules.
The sensor and actuator abstraction module (SAAM) provides a
mechanism that hides the heterogeneity between different virtual and
physical robot hardware.
This mechanism allows the Mobile-R robot control system to migrate from
virtual robots executing in a simulation environment to real-world
physical robots operating in the field.
Sensor data acquisition and actuator signal control is accomplished
using the Mobile-R hardware abstraction layer (HAL).
The informatic algorithm module (IAM) allows for the
injection of user defined filters and algorithms for sensor and actuator
signal processing.
The communication hardware and protocols module (CHPM)
provides communication access to all available communication mechanisms
and the necessary protocols to communicate with other devices.
Low-level communications are accomplished using the Mobile-R hardware
abstraction layer (HAL).
The human-machine interface module (HMIM) allows for the
use of application specific interfaces to be installed, removed, or
replaced during a mission involving human-robot interaction.
The logger module (LM) provides a mechanism for
general-purpose data logging and debugging.
The logged data can either be saved directly on the robot or transmitted
to a logging host.
Task Agent
Task agents provide a mechanism for task allocation, reallocation and sharing. The task agent contains the necessary algorithms, data, and utility functions to successfully accomplish the task. If a robot wants to change a task or is instructed to change a task, dynamic task allocation is performed by having a new task agent migrate to the robot or a task agent migrate to a task knowledge base to retrieve new task information. Task agents can also be shared or switched between collaborating robots. Although multiple mobile task agents can exist on the same robot, only one task can be executed at a given time. Execution priority is dictated through the use of the task utility function provided by the task and an internal Deliberative Agent utility mechanism. Task agents may provide the Deliberative Agent task data as high-level commands that are then broken down into action sequences by the internal executive and planner modules or provide services that will produce the desired outputs. Other task agent service may include the necessary communication protocols to obtains sensor data from external sources, collaboration information and protocols, etc.
Behavior Agent
Behavior agents act very similarly to task agents except they strictly deal with the reactive layer. Behavior agents are spawned by the robot in order to acquire new behavioral components from other robots or knowledge bases. Another host may send a behavior agent to the robot to either remove, install, or replace a behavioral component. Behavior cloning and migration comes in handy when a distressed robot requires a behavior. In some scenarios, it is more efficient to have localized robots with the required behavior clone and migrate the behavior to the distressed robot.
Device Agent
The device agent allows for the reconfigurability of the Hardware Agent modules by either installing, removing, or replacing modules. In some situations, it may be desirable apply a filter to specific sensor inputs, modify the HMI, or add additional protocols for communication. Device Agents can be instantiated by the robot in order to acquire new capabilities equivalent to automatically acquiring necessary plug-ins. Device Agents may also be sent from an outside host.
Service Discovery Agent
Currently, FIPA is preliminary stages of constructing an agent discovery
service specification for multi-agent systems \cite{FIPA-ADS}.
However, the FIPA discovery service specifications does not employ a
mechanism for physical services that may be available with physical
robot systems.
Therefore, a similarly discovery service mechanism, following the
guidelines provided by the FIPA specifications, will be implemented
using service discovery agents (SDAs) communicating with
a service discovery protocol (SDP) over ACL similar to the pervasive
discovery protocol (PDP).
Each robot node contains a service discovery agent that keeps track of the
services the robot is willing to provide to other robots in the network.
In contrast, the directory facilitator (DF) of the FIPA compliant mobile
agency will keep track of local services provided by on-board agents.
A robot node in need of a service will initiate a service search which is
dealt with by the service discovery agent.
The service discovery agent broadcasts a query request, SDP\_REQUEST, to
service discovery agents on nearby robots.
If a robot contains the desired service, it broadcasts a reply message,
SDP\_REPLY.
All of the other SDAs on nearby robots will hear the reply and store the
information in their SDA lists.
If only one resource is found that provides the desired service, the robot
will have to wait until the resource becomes available.
Flexible Multi-Robot System Compositions
Using Mobile-R, multiple types of multi-robot system compositions are capable as shown in Figures 4 and 4b Figures 4 a-d demonstrate the ability to create multi-robot systems with homogeneous control structures. Figure 4a demonstrates the ability to create a purely reactive robot network in which the reactive agents are capable of sharing behavior data for dynamic task allocation, role switching, and cooperative task completion. This type of system composition provides a framework for swarm and modular robot system research. Figure 4b demonstrates the ability to create a purely deliberative robot network. As with the reactive system, the deliberative agents are capable of sharing high-level tactical information for coordination and collaboration. Figure 4c demonstrates the ability of creating a hybrid control robot network where the robots contain both a deliberative and a reactive component. Combining both the reactive robot network and the deliberative network, the reactive agents and the deliberative agents are capable of communicating in order to accomplish the necessary tasks. Figure 4d demonstrates the ability of implementing a pure tele-operated robot network. Different level of tele-operations are possible allowing for either a complete drive-by-wire system or semi-autonomous system.
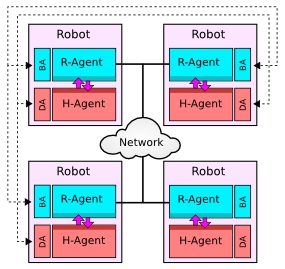
Figure 4a: Reactive control robotic system network.
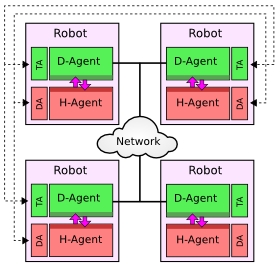
Figure 4b: Deliberative control robotic system network.
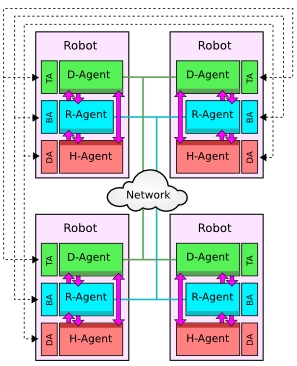
Figure 4c: Hybrid control robotic system network.
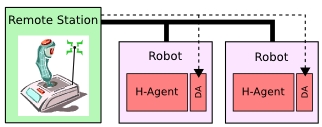
Figure 4d: Tele-operated control robotic system network.
Figure 5 demonstrates the ability to create multi-robot systems with heterogeneous control structures. These systems provide the foundation for large scale multi-robot systems comprising of different robotic paradigms.
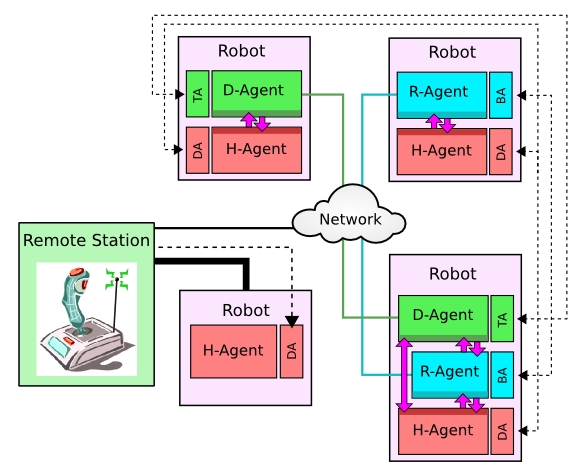
Figure 5: Heterogeneous robotic system network topological configuration.
Inter-Agent Communication
Agent communication in a FIPA compliant mobile agent system is based on
passing messages that must comply with the FIPA Agent Communication
Language (ACL).
It is assumed that the underlying mobile agent system will contain the
required mechanisms for creating and reading FIPA ACL messages.
FIPA provides a set of agent interaction protocols, a high-level
communication pattern through an admissible sequence of messages between
agents, to direct agent conversation.
Implementation specific information is stored the available context
tag which is a string that may contain any predefined message.
The context tag must be understood by both communicating agents.
Mobile-R utilizes four specific FIPA interaction protocols:
FIPA_REQUEST, FIPA_REQUEST_WHENEVER, FIPA_INFORM, and
FIPA_CONTRACT_NET.
The FIPA_REQUEST protocol is used to request immediate data or response to
a query specified by the context tag.
An example includes the request of a current sensor measurement or the
control of an available resource.
The FIPA_REQUEST_WHENEVER protocol provides a means of acquiring multiple
data measurements without having to request for it every time it is
available.
This protocol is generally used with event dependent scenarios.
An example includes the request of a current sensor measurement whenever a
new sensor measurement is acquired.
Instead of continuously requesting for new sensor data, the mobile agent
handling the resource publishes the new data to subscribed mobile agents
whenever new data is available.
The FIPA_INFORM protocol is used to inform agents of changes to the system.
An example includes informing a mobile agent that a new service is available.
The FIPA_CONTRACT_NET protocol specifies problem-solving communication and
control for agents in a distributed system.
Deliberative and Reactive Agent Communication
The Deliberative Agent to Reactive Agent communication protocol contains handshaking messages to initiate collaboration and information exchange messages for behavioral arbitration. The Deliberative Agent to Reactive Agent communication procedures are shown in Figures 6 a-c.
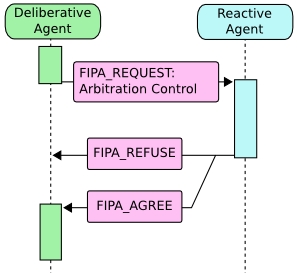
Figure 6a: Arbitration control request.
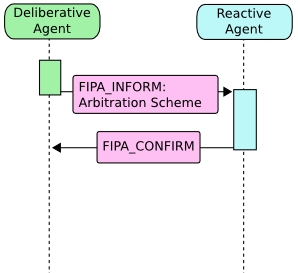
Figure 6b: Setting the arbitration scheme.
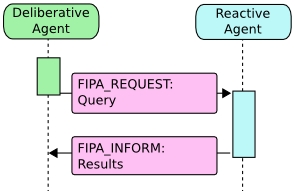
Figure 6c: Query request.
As shown in Figure 6a, the Deliberative Agent first sends a FIPA _REQUEST message to initiate arbitration control of the Reactive Agent. If arbitration control has already be designated to a different Deliberative Agent, the Reactive Agent refuses. Once control have been established, the Deliberative Agent can monitor the behavioral structure and modify it willingly by sending a FIPA_INFORM message as shown in Figure 6b. The Deliberative Agent can also query the current behavioral structure and get an inventory of installed behavioral components by sending a FIPA_REQUEST message as shown in Figure 6c.
Deliberative and Hardware Agent Communication
The Deliberative Agent to Hardware Agent communication contains collaboration initialization, information exchange, and control messages. The Deliberative Agent to Hardware Agent communication procedures are shown in Figures 7 a-c.
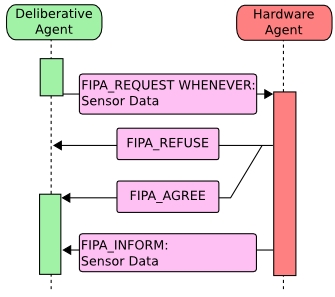
Figure 7a: Hardware control request.
Figure 7b: Setting the control parameters or actuator signals.
Figure 7c: Sensor data query request.
On arrival, a Deliberative Agent sends a FIPA_REQUEST message asking for control of the system as shown in Figure 7a. The Hardware Agent may respond with either a FIPA_REFUSE or FIPA_AGREE message. If the Hardware Agent is already being controlled by another Deliberative Agent, the Hardware Agent refuses the new request. As shown in Figure 7b, while controlling the Hardware Agent, the Deliberative Agent can query the Hardware Agent for a listing of available hardware modules and sub-module information, request sensor data, modify control parameters, and take direct physical control of the system by providing the necessary actuator signals. Query interactions are accomplished using the FIPA_REQUEST message while commands are send using the FIPA_INFORM message. During its execution, the Deliberative Agent may require low-level sensor or robot data whenever the data becomes available. Therefore, as shown in Figure 7c, the Deliberative Agent sends a FIPA_REQUEST_WHENEVER message to the Hardware Agent with the context tag containing the desired event and measurement tags. The Hardware Agent may respond with either a FIPA_REFUSE or FIPA_AGREE message. An example includes the acquisition of the current encoder information for odometry calculations.
Deliberative and Task Agent Communication
When a task agent has been received, the task agent will inform the Deliberative Agent of its presence by sending a FIPA_INFORM message carrying the priority of the task and the utility function service name provided by the task agent as shown in Figure 8a. If the task agent only contains high-level task commands, they will be sent to the Deliberative Agent during the initial inform message and the task agent will self terminate or migrate to another host. Therefore, task agents can be told to migrate through all of the available robots with different task commands for specific robots. As shown in Figure 8b, if the task agents contains a task service, the Deliberative Agent can then choose to execute the task service.
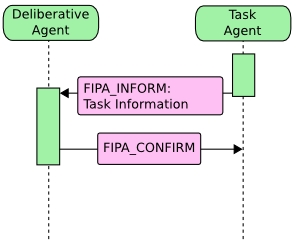
Figure 8a: Task presence.
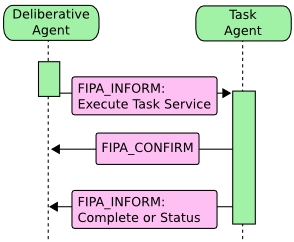
Figure 8b: Executing a task service.
Reactive and Behavior Agent Communication
The Reactive Agent to behavior agent communication procedures are shown in Figure 9.
Figure 9: Reactive Agent to behaviors agent communication.
With the arrival of a new mobile behavior agent, the mobile behavior agent sends a FIPA_INFORM message to the Reactive Agent with the context tag containing the names and types of the behavioral services that are available. The Reactive Agent responds with FIPA_CONFIRM indicating that it has received the information. The Reactive Agent then adds the services to the respectable internal behavioral linked list for execution at each control interval.
Reactive and Hardware Agent Communication
The Reactive Agent to Hardware Agent communication procedures are shown in Figures 10 a-c.
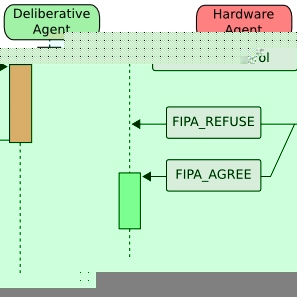
Figure 10a: Hardware control request.
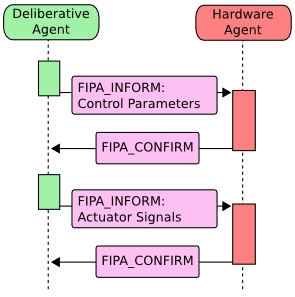
Figure 10b: Sensor data query request.
Figure 10c: Setting the actuator signals.
As shown in Figure 10a, when the Reactive Agent is started, it sends a FIPA_REQUEST message to the Hardware Agent to request control of the lower system and set the desired sensor data update interval. Once approved, the Reactive Agent initiates a FIPA_REQUEST_WHENEVER protocol with the Hardware Agent asking that the Hardware Agent inform the Reactive Agent of new sensory data when it is available as shown in Figure 10b. When new sensor data is delivered to the Reactive Agent, it processes all of the required behavioral components and communicates the desired actuator control signals to the Hardware Agent using the FIPA_INFORM protocol as shown in Figure 10c.
Hardware and Device Agent Communication
The device agent to Hardware Agent communication procedures are shown in Figure 11.
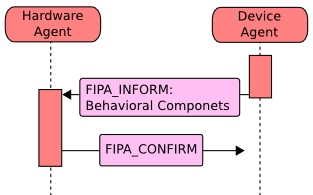
Figure 11: Device agent to Hardware Agent communication.
Similar to the behavior agent and Reactive Agent communication, with the arrival of a new mobile device agent, the device agent sends a FIPA_INFORM message to the Hardware Agent with the context tag containing the names of the device services that have been added to the system and the type of services that they provide. The Hardware Agent responds with FIPA_CONFIRM indicating that it has received the information. The Hardware Agent then adds the services to their respectable linked list for execution at each control interval. This allows for the build-up of different device informatic implementations.
Inter-Robot Cooperative Agreements
During the operation of a network robot system, it may be necessary for robots to engage in collaborative work. To do so, a robot will initiate a contract net or an auction with surrounding robots as shown in Figure \ref{fig:agreement-a}. The other robots will then submit a bid based on their current state and potential gains as shown in Figure \ref{fig:agreement-b}. The contract net communication procedures are shown in Figure \ref{fig:agreement-c}. The initiator then selects the winning bid and proceeds with the collaborative work. FIPA defines several multi-agent market-based communication protocols including contract nets, iterated contract nets, English auction, and Dutch auction. These protocols are implemented in Mobile-C for inter-agent collaboration.
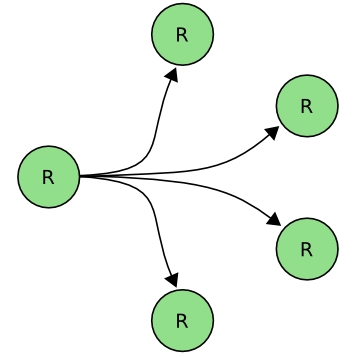
Figure 12a: A robot initiates an auction for collaboration.
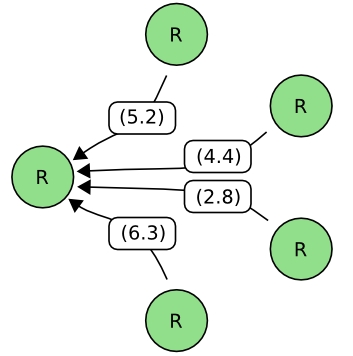
Figure 12b: The robots bid for the collaborative auction.
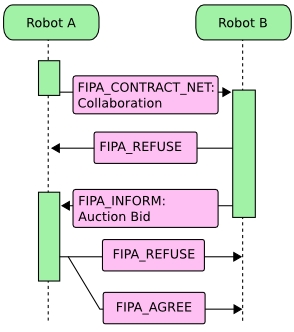
Figure 12c: Inter-robot contract net communication procedures.
Physical and Virtual Robot Hardware Abstraction Layer
Mobile-R has the capability of interacting with both virtual robots in a simulation environment and physical robots interchangeably. Control of a robot is accomplished through a hardware abstraction layer (HAL) as shown in Figure \ref{fig:systemarch}. The HAL contains wrappers to hardware dependent control libraries which act as a low-level middleware to hide the heterogeneity of the underlying robot hardware. By using the libraries provided by available multi-robot simulation systems and robot manufactures, new wrappers can easily be developed allowing the Mobil-R system to have complete functionality over the different types of physical and virtual robots. With this versatility, researchers are able to continue using the simulation system they are familiar with and currently using. Mobile-R users may also implement in-house simulation systems and generate their own wrappers.
High-Level Packages
Mobile-R also provides higher functionality packages to enhance
system capabilities.
These packages currently include an artificial neural network, genetic
algorithm, vision, and distributed computing modules.
Artificial Neural Networks (ANN) are bio-inspired mechanisms of data
processing that enables systems to learn and potentially generalize after
solutions to enough problems set are taught.
Artificial neural networks have been used for many different types of
applications including adaptive controller designs and object detection
and characterization with vision systems.
The package provides users with the ability to create neural
networks in their robot control architecture agents, thus allowing for
the implementation of learning networks.
Genetic algorithms (GAs) are global search heuristics used to find exact or
approximate solutions to optimization and search problems.
The are a particular type of evolutionary algorithm inspired by evolutionary
biology.
Genetic algorithms have been used for robot learning and path planning.
The genetic algorithms package provides users with the ability to quickly
implement and use a genetic algorithm based system.
The computer vision package facilitate the acquisition of video or image
data from on-board vision sensors.
It provides many functional tools including object and face recognition,
3D reconstruction, and much more.
The package also provides the necessary tools for image manipulate which may
be necessary in order to save on-board storage or reduce the amount of
data transmitted from one node to another.
One benefit of having many robots in a multi-robot system is the ability to
pool all of their computing power together.
A distributed computing package is provided to allow multiple robot nodes
to work together in order to solve a computationally intensive problem.
If desired, a robot can request the computational resources from any
available node around it.
This can include any type of computing system from other robots to
computer systems attached to the same network.